
我是中山大学电子与通信工程学院空间智能实验室的硕士研究生,师从高庆教授。 本科毕业于重庆邮电大学通信与信息工程学院通信工程专业。在学期间,多次获得学业奖学金。 我的研究兴趣包括计算机视觉、机器人遥操作和具身智能。
📖 教育经历
- 2023.09 - 2025.04 (now), 硕士,电子与通信工程学院,中山大学,深圳。
- 2019.09 - 2023.06, 本科, 通信与信息工程学院, 重庆邮电大学,重庆。
🔥 新闻
- 2025.04: 🎉🎉 论文《HR-GCN: 2D-3D Whole-body Pose Estimation with High-Resolution Graph Convolutional Network From a Monocular Camera》被IEEE Sensors Journal接收.
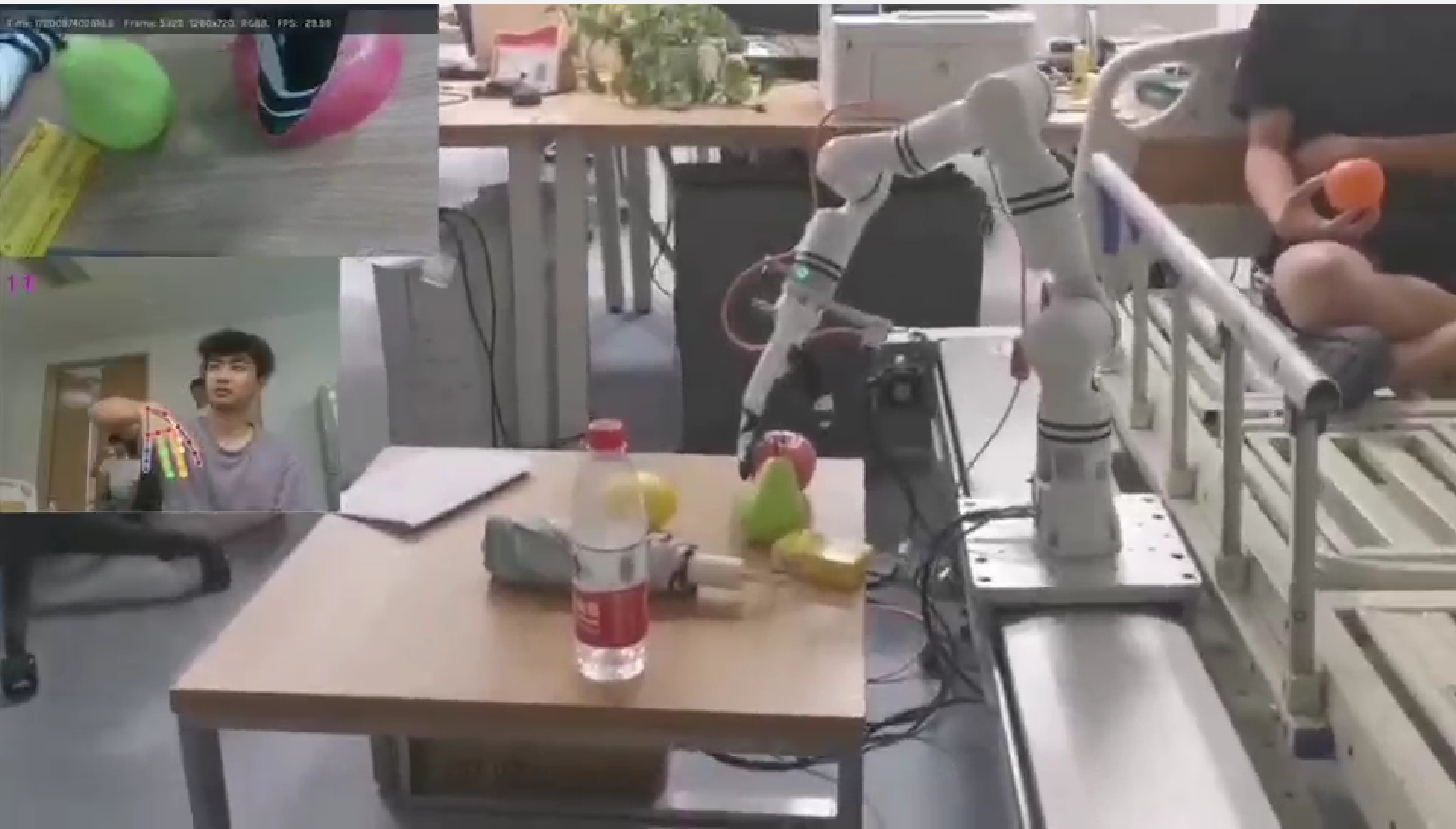
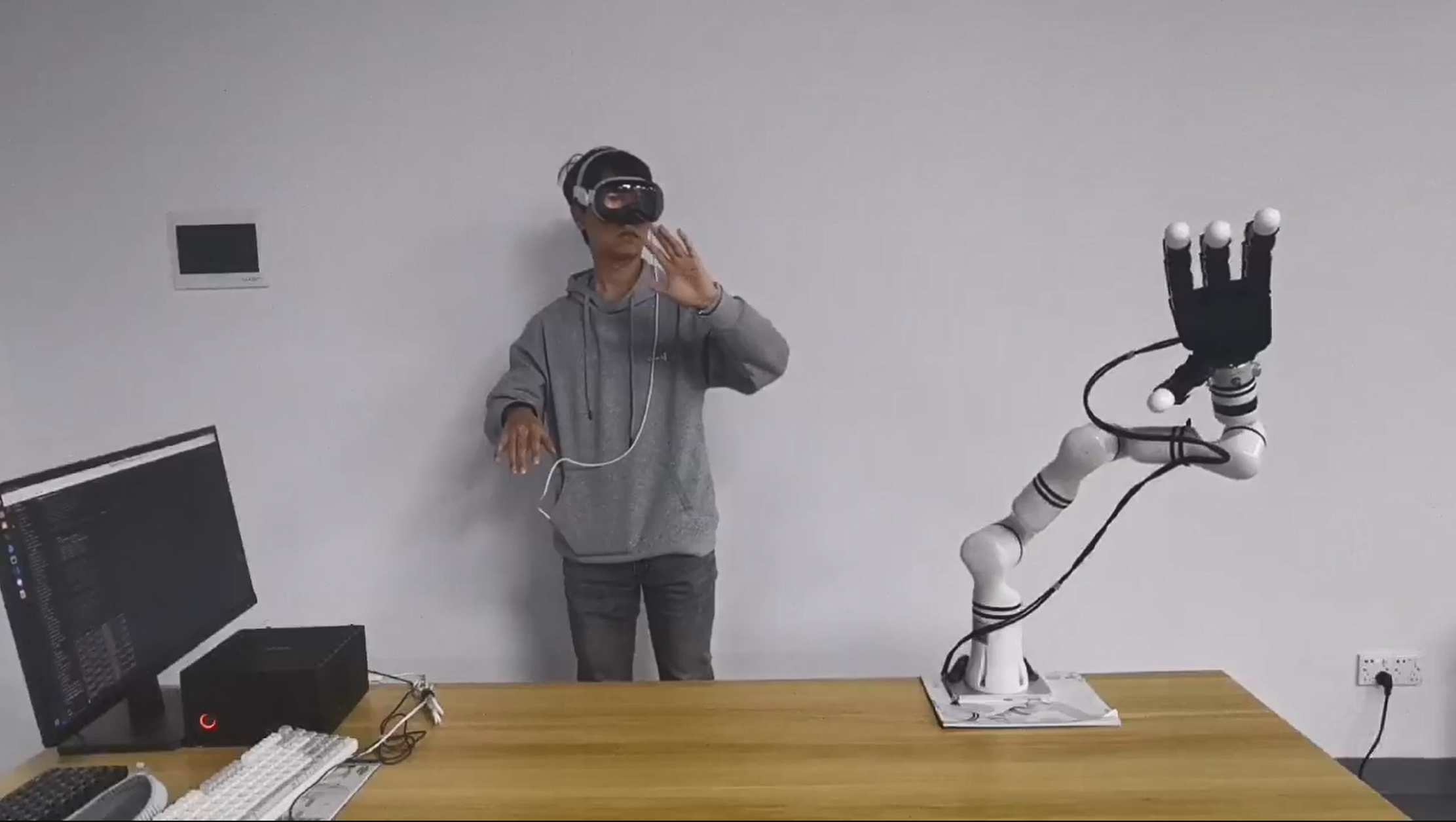
- 2025.02: 🎉🎉 发明专利《基于视觉的仿人机械手臂多模式遥操作抓取方法及系统》被授权.
- 2025.01: 🎉🎉 论文《3D Whole-body Pose Estimation Using Graph High-Resolution Network for Humanoid Robot Teleoperation》被ICRA2025接收.
- 2024.11: 🎉🎉 发明专利《基于图卷积高分辨率网络的三维人资姿态估计方法及装置》被授权.
📝 发表文章
ICRA 2025
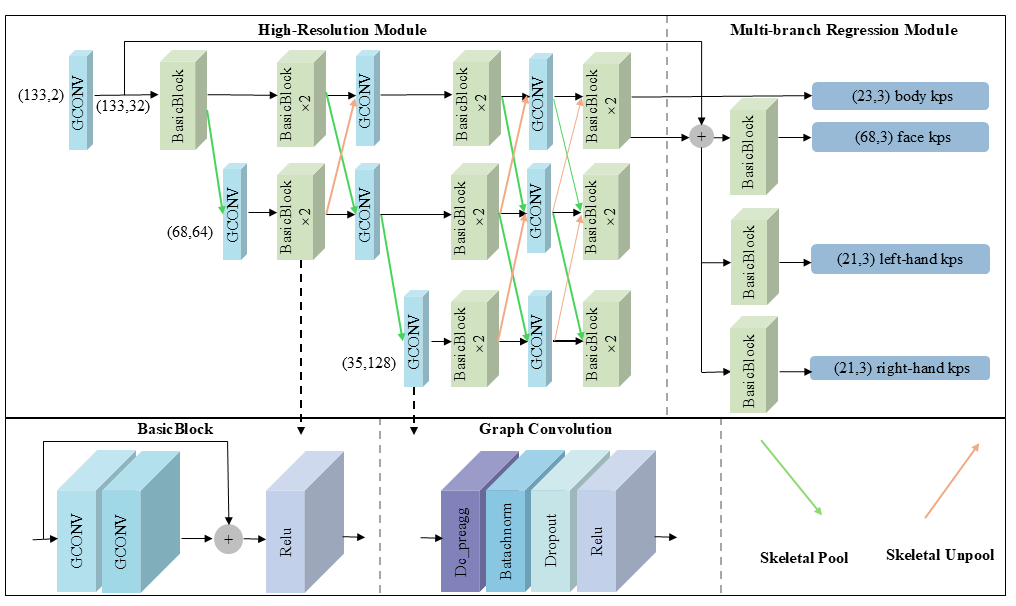
3D Whole-body Pose Estimation Using Graph High-Resolution Network for Humanoid Robot Teleoperation
Mingyu Zhang, Qing Gao, Yuanchuan Lai, Ye Zhang, Tao Chang, Yulan Guo
🎖 项目、竞赛
2024.03
2024.03
2024.12

💻 实习
- 2025.07 - 至今, 华为, 上海.
- VLN(Vision-Language Navigation) 项目: 调研当前视觉语言导航领域的进展,并部署基于场景图表示的LLM 零样本导航算法Unigoal到UnitreeGo1/Go2W 上,实现了根据目标名称,目标图片和目标环境文本描述三 种类型的导航任务。
- VLA(Vision-Language Action) 项目:采用 UMI 改进版本 FastUMI 通过人手持夹爪进行快速精确数据采集, 而无需复杂和低效的遥操作系统。采集的绝对/相对末端执行器轨迹,还可以转化机械臂关节轨迹数据,用 于ACT或者DP训练。